STEROWANIE GŁOSOWE GNIAZDEM ZROBOTYZOWANYM
ZADANIE:
Napisać w języku ARLANG program sterujący robotem MOVEMASTER-EX,
wykorzystujący specjalistyczne makra odpowiedzialne za sterowanie zachowaniem
poszczególnych urządzeń
elastycznego gniazda obróbkowego.
W wyniku realizacji tego programu przedmiot obrabiany (wałek) zostanie pobrany
przez robota z jednej z pozycji na palecie, przeniesiony na obrabiarkę,
tam poddany obróbce według określonego programu obróbki technologicznej,
po czym przeniesiony na inne miejsce na tej samej albo drugiej palecie.
Pozycja początkowa i docelowa oraz numer programu obróbki technologicznej
będą określane w drodze dialogu między użytkownikiem i komputerem.
Komputer będzie wygłaszać komunikaty poprzez głośnik, zaś użytkownik będzie
wydawać polecenia za pomocą komend głosowych wygłaszanych do mikrofonu.
Program musi uwzględniać właściwe reakcje na błędne informacje podawane
przez użytkownika.
PRZYGOTOWANIE: Przed przystąpieniem do
ćwiczenia uczestnicy zobowiązani są
do zapoznania się z zasadami programowania robota MOVEMASTER, zawartymi
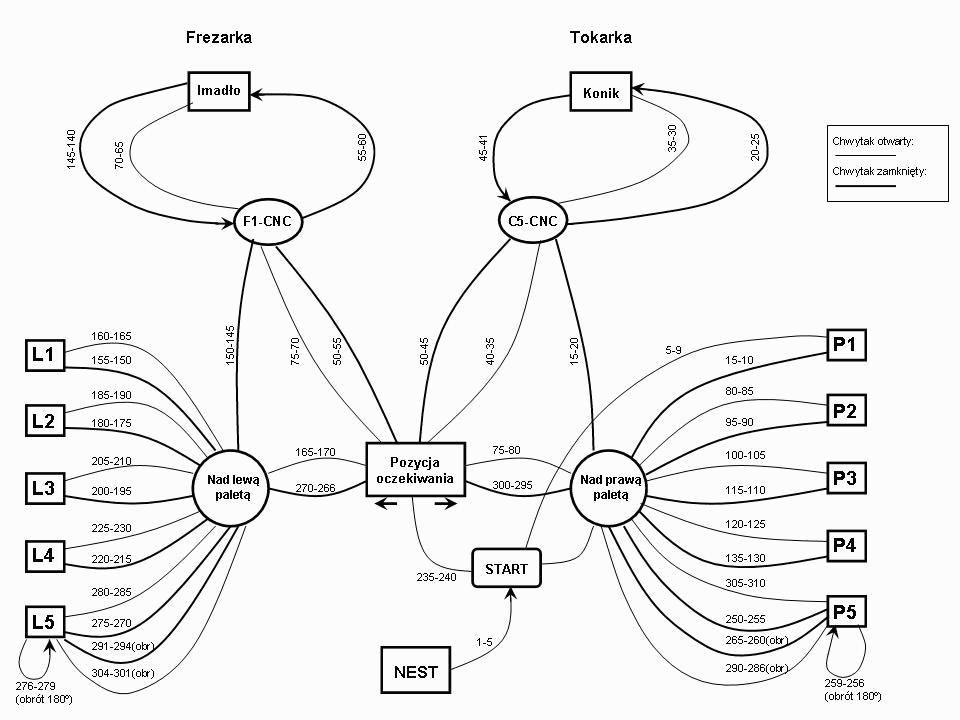
w pliku ROBOT.TXT oraz z DIAGRAMEM
pozycji robota obsługującego elastyczne
gniazdo obróbkowe EMCO (diagram ten jest omówiony w dokumentacji zawartej w pliku
ROBOT.TXT).
Uczestnicy zajęć muszą też zapoznać się z treścią pliku ARLANG.TXT, w którym opisane
jest wykorzystanie języka ARLANG do generowania instrukcji sterujących dla robota
oraz instrukcje języka ARLANG służące do realizacji dialogu głosowego.
Zasady zapisu komend głosowych omówione są w pliku KOMENDY.TXT.
Ponadto uczestnicy zajęć muszą zapoznać się ze sposobem wykorzystania specjalistycznych
makr służących do sterowania z poziomu robota urządzeniami elastycznego gniazda
obróbkowego EMCO według dokumentacji zawartej w pliku MAKRA.TXT.
Zaleca się aby każdy uczestnik szczegółowo prześledził przykłady umieszczone
w tej dokumentacji. Ich całkowite zrozumienie jest konieczne do prawidłowego
zrealizowania ćwiczenia.
{kind=link}