PROGRAMOWANIE ROBOTA Z UWZGLĘDNIENIEM ANALIZY OBRAZU
ZADANIE:
Należy napisać program w języku ARLANG, który będzie
generować instrukcje sterujące robotem MOVEMASTER,
w wyniku których robot zrealizuje zadanie manipulacyjne polegające
na chwyceniu przedmiotu (wałka) znajdującego się na jednej
z pozycji na palecie, a następnie umieszczeniu tego wałka
na miejscu wskazanym przez prowadzącego zajęcia.
W celu określenia początkowego położenia wałka na palecie (które
nie będzie jednoznacznie podane) program generujący instrukcje
sterujące będzie musiał wykorzystać informacje z systemu analizy obrazu,
a zwłaszcza dane dotyczące położenia środka masy obrazu przedmiotu.
PRZYGOTOWANIE:
Przed przystąpieniem do ćwiczenia uczestnicy zobowiązani są
do zapoznania się z zasadami programowania robota MOVEMASTER,
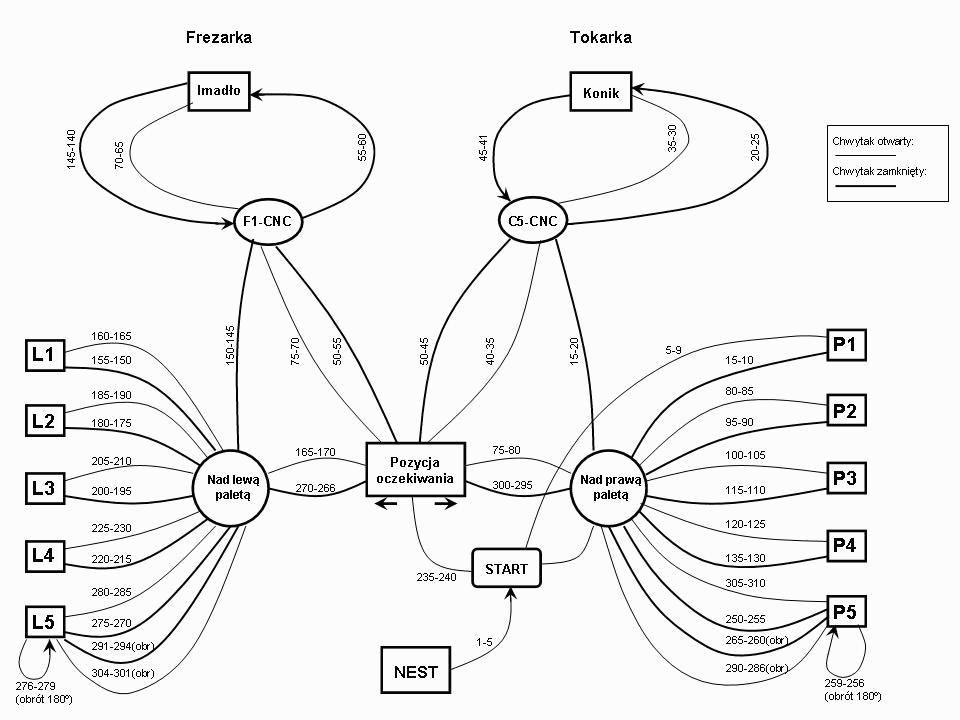
zawartymi w pliku ROBOT.TXT oraz z DIAGRAMEM
pozycji robota
obsługującego elastyczne gniazdo obróbkowe EMCO
(diagram ten
jest omówiony w dokumentacji zawartej w pliku
ROBOT.TXT).
Ponadto uczestnicy zajęć muszą zapoznać się z wykorzystaniem
języka ARLANG do generowania instrukcji sterujących dla
robota, co jest opisane w pliku ARLANG.TXT.
Zaleca się aby każdy uczestnik szczegółowo prześledził
przykłady umieszczone w tej dokumentacji. Ich całkowite
zrozumienie jest konieczne do prawidłowego zrealizowania
ćwiczenia.
{kind=link}